

Completed projects
Robot Persuasiveness on the Acceptance of Health Regulations

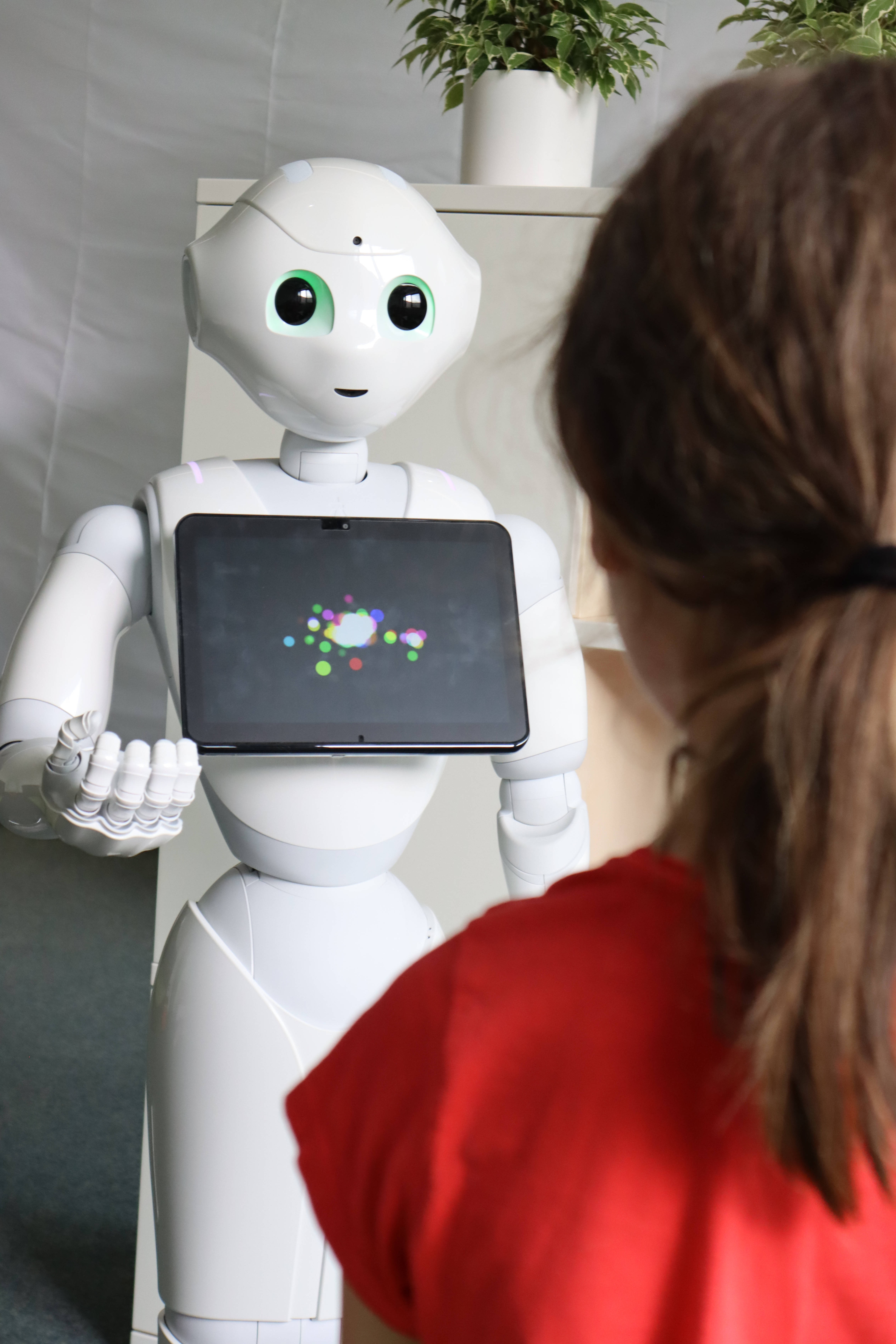
In face of the Corona-pandemic, social robots in public places could be a useful tool to guide and remind people to adhere to general regulations (e.g., wearing a mask, keeping social distance). Additionally, robots could be a useful assistive tool for public order offices, such as reducing risks of infection for employees. However, it is uncertain whether and how robots could enhance regulation adherence. To this extent, this student project conducted a 2 (distraction: yes/no) by 2 (argument: strong/weak)-mixed HRI video study investigating a robot's argument’s persuasiveness based on the Elaboration Likelihood Model of persuasion (ELM). Participants watched a video of the robot Pepper persuading people to wear a mask using either a strong or a weak argumentation. As a distraction, participants had to either count the occurrences of the word mask in the video or not. Our results show that the distraction had no influence, while the argument’s strength significantly influences the perceived robot’s persuasiveness.
Further information
- Agents
- People
Dr. Sebastian Schneider
Wissenschaftlicher Mitarbeiter im EU / ERC Advanced Grant geförder-tem Projekt: The Future of Predic-tion: The Social Consequences of Algorithmic Forecast in Insurence, Medicine and Policing – PREDICT (Projektleitung: Prof. Dr. Elena Esposito)
- Publications
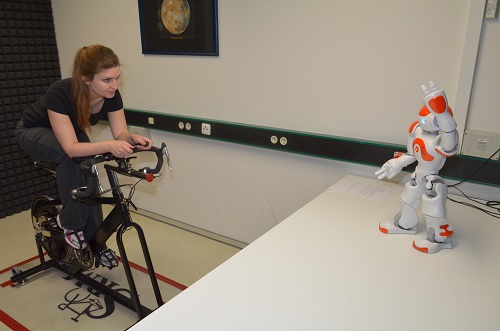
SoziRob

The aim of the SoziRob-project is the development of intelligent robots with social interaction capabilities which support astronauts to overcome better the physical and mental exposures of long-term missions in a closed habitat. This includes the development, implementation and evaluation of a motivation module for the qualitative and quantitative improvement of fitness training to avoid amyothrophia. In addition, social activities should be stimulated by playing the game pairs with the robot Flobi. In long-term missions in space, physical exercises are crucial to preserve humans physical condition until returning to Earth. Additionally, exercises can help to cope with stress, offer cognitive benefits, and prevent negative morals. However, training in space is more difficult. Training is often not divert, and lacks a training partner. In addition, the environment in outer space impacts the physical condition. In cooperation with the German Aerospace Center the SoziRob project was initiated. The goal of the project was to investigate the benefits of robotic systems to space missions as assistive partners. Two interaction scenarios were designed and implemented for a long-term isolation study. The first scenario focused on physical exercise. The robot Nao acts as training coach, supporting humans during sport exercises and guides through indoor cycling sessions. During each session Nao announces exercises to be performed by the participant and supports each exercise with body movement. The second scenario focused on social interaction between a human and a robot. The robot head Flobi provides an entertaining interaction, playing the game of pairs. The interaction was designed to cheer the participants and to decrease stress. In addition, the type of game provides a cognitive challenge and therefore a mental benefit. We evaluated our scenarios and system during a three-weeks isolation study at the German Aerospace Center in Cologne.